
Status des Praktikums: vergeben
Betreuer: Michael Hödlmoser
Beschreibung

Neurowissenschaftliche Studien zeigten, dass das menschliche Gehirn mittels 3D Repräsentation von Objekten arbeitet und diese Informationen – es ist noch unklar wie – speichert um die vom Menschen gewohnte, auf hohem Level praktizierte Objekterkennung zu erreichen. Kinect ist eine Hardware zur Steuerung der Videospielkonsole Xbox 360, die seit Anfang November 2010 verkauft wird. Durch den Einsatz des Structured Light Verfahren ermöglicht das System die echtzeitfähige Generation einer Tiefenkarte.
Literatur:
[1] Koller, D. et al: Model-Based Object Tracking in Monocular Image Sequences of Road Traffic Scenes, IJCV, 1993.
[2] Leibe, B. et al: Dynamic 3D Scene Analysis from a Moving Vehicle, In Proc. of CVPR, pp. 1 – 8, Minnesota, USA, 2007.
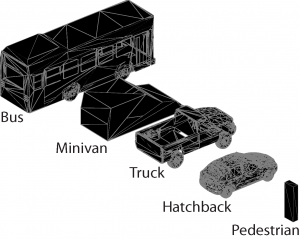
Zielsetzung
Ziel dieses Praktikums ist die Entwicklung eines Frameworks zur 3D Objekterennung in Videos. Durch die Verwendung des Microsoft Kinect Systems erhält man eine Tiefenkarte der beobachteten Szene in Echtzeit. Diese Tiefeninformation kann danach direkt verwendet werden, ein 3D Modell eines Objektes (z.B. eines Autos) in der Szene abzubilden und dadurch eine Lokalisierung sicherzustellen [1,2].
Gliederung
- Einbindung der Kamera in Matlab.
- Implementierung des Frameworks.
- Schriftlicher Bericht und Präsentation des Praktikums.
Sonstiges
- Grundlegende Kenntnisse der Bildverarbeitung von Vorteil
- Matlab Kenntnisse von Vorteil