
Dates
- Computer Vision (VU) is in person in WS2025/2026. However, the exercise part will mainly take place virtually.
- A timetable for the orientation of the lecture part is provided here.
- Exercise part: Six tutoring hours TH 9:00 – 12:00, see the schedule in the TUWEL course.
Location
- Lecture part: Monday, Wednesday from 16:00-18:00, and Friday, from 12:00-14:00 in FAV Hörsaal 1 Helmut Veith.
- Exercise part – tutor hours: virtual via Zoom (1 registration per group via TUWEL required)
- Two submission talks via Zoom
The exercise part will be handled via the associated TUWEL course (available from the 8th of October). In the semester, various tasks will be solved in Python for the exercise part in groups of 3. For support, there will be supervised practice times, which will take place 6x in the semester. Please register in TUWEL for a group of 3. The kickoff session for the exercise will take place on the 8th of October.
Lecture exam: Registration in TISS

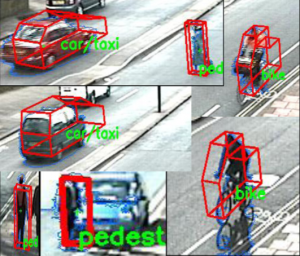
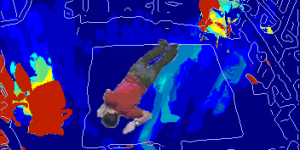
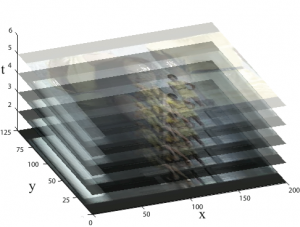

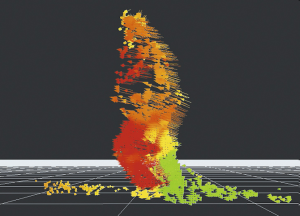
Computers are still limited in their ability to interact with the world and human users because they cannot “see.” When dealing with computer vision, we must also try to understand the world’s physics, such as how light reflects off surfaces, how objects move, and how all of this information is projected onto an image through the camera’s optics. It also requires the development of algorithms that reconstruct some of these physical properties from one or more images. This “inverse” problem is a big puzzle. Information is lost when the three-dimensional world is projected onto a two-dimensional image, so how do we recover this information from an image? This course shows the fundamental algorithms that make this goal achievable and develops methods for solving inverse problems. However, vision is more than just reconstructing the 3D world from 2D images; it also involves extracting semantics. The course also demonstrates basic machine learning and probabilistic inference methods to solve this problem.
Even if you do not plan to study computer vision further, the basic tools and techniques used there can be useful in many other areas. For all those who want to learn more about computer vision, this course provides a reasonable basis for further study.
Content:
- A perspective on many areas of current computer vision research
- An implementation of programming tasks to gain practical experience with working with images and image sequences
- The application of linear algebra and calculus for something you can use in the real world
Organization:
- Registration: via TISS
- Documentation: Computer Vision: Algorithms and Applications
- Schedule