
Status des Praktikums: offen
Betreuer: Robert Sablatnig
Problemstellung
Verfahren der Bildverarbeitung ermöglichen eine strukturelle Erfassung und dreidimensionale Rekonstruktion von Innenräumen in Form von 3D-Punktwolken. Die geometrische Rekonstruktion gibt diesen Punkten i.A. keinerlei Semantik, ein Problem dessen Lösung eine Vielzahl von praktischen Anwendungen erschließen würde. Beispielsweise wäre ein Verständnis über die Existenz von Boden und Wänden für die visuelle Verfolgung von Personen sehr hilfreich. Die semantische visuelle Klassifizierung von 3D-Punktwolken in Boden, Wand und Decke (Abbildung 1) beinhaltet eine Reihe von noch offenen wissenschaftlichen Fragestellungen, die im Rahmen dieses Praktikums näher erfahren werden sollen.
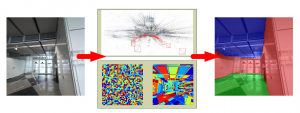
Abbildung 1: Klassifizierung durch "Super-Pixel" Segmentierung und den phsikalischen Gesetzmässigkeiten von Innenräumen. v.l.n.r. Aufnahme am Flughafen München. Klassifizierungsverfahren: 3D-Punktwolke, Hypothesen. Einteilung der 3D-Punkte und Pixel in Boden (grün), Wand (rot), Decke (blau).
Zielsetzung
Im Rahmen des Praktikums sollen vorliegende 3D-Punktwolken von Teilbereichen des Flughafen Münchens durch ein manuelles Verfahren klassifiziert werden.
Ablauf
- Literaturstudium: Verständnis über semantische visuelle Klassifizierung von 3D-Punktwolken
- Programmierung (C/C++/Python) eines manuellen Klassifizierungsverfahrens mittels PointCloud Bibliothek.
- Schriftlicher Bericht und Präsentation des Praktikums
Literatur
Michael Hoedlmoser and Branislav Micusik
Surface Layout Estimation Using Multiple Segmentation Methods and 3D Reasoning Iberian Conference on Pattern Recognition and Image Analysis (IbPRIA), Portugal, 2013.
Michael Hoedlmoser, Branislav Micusik and Martin Kampel Sparse Point Cloud Densification by Using Redundant Semantic Information International Conference on 3D Vision (3DV), USA, 2013.